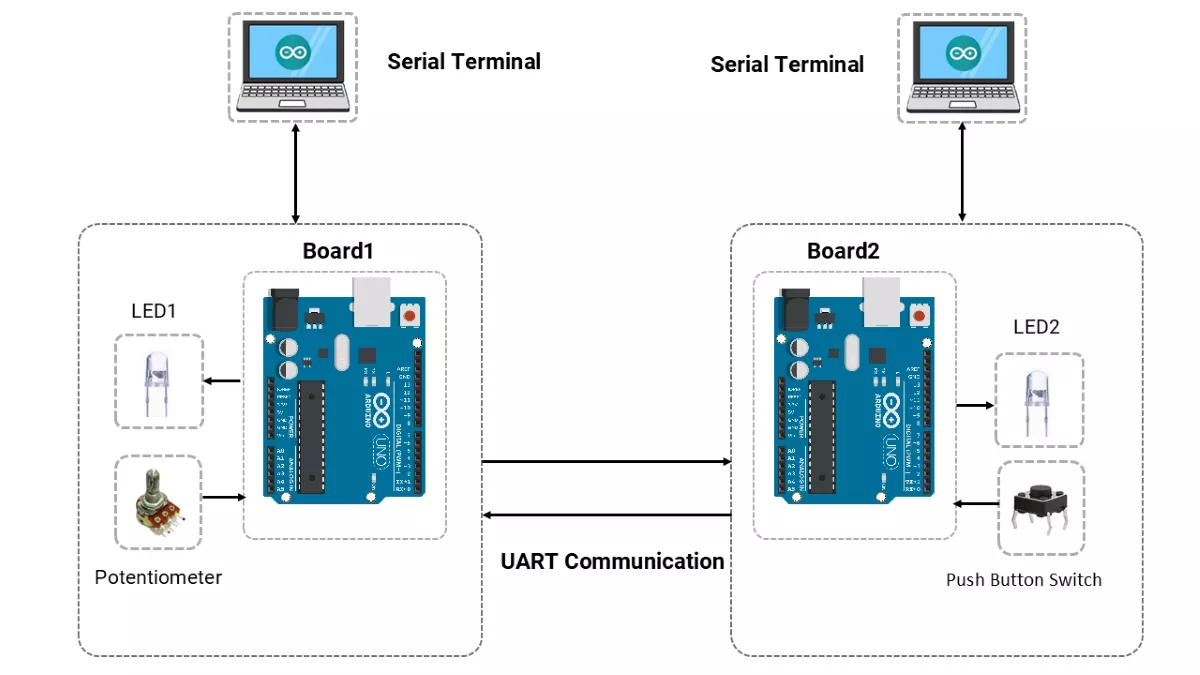
71. UART-Based LEDs Control
Back To All Submissions
Previous Submission
Next Submission
Solving Approach
How do you plan to solve it?
Code
#define LED_Pin 6
#define Button_Pin 5
uint8_t toggle = 0;
int buttonRead[2] = { 0 };
void setup() {
Serial.begin(9600);
pinMode(LED_Pin, OUTPUT);
pinMode(Button_Pin, INPUT_PULLUP);
}
int buttonPressed()
{
buttonRead[0] = digitalRead(Button_Pin);
delay(150);
buttonRead[1] = digitalRead(Button_Pin);
//Serial.println(buttonRead[0]);
//Serial.println(buttonRead[1]);
if(buttonRead[0] == 0 && buttonRead[1] == 0)
return 1;
else
return 0;
}
void loop() {
if(buttonPressed())
{
toggle ^= 1;
Serial.write(toggle);
}
if(Serial.available() > 0)
{
char receivedChar = Serial.read();
analogWrite(LED_Pin, (uint8_t)receivedChar);
}
}
/*
* my_main.c
*
* Created on: Mar 14, 2026
* Author: georgegio
*/
#include "my_main.h"
UART_HandleTypeDef usart2, usart3;
ADC_HandleTypeDef adc1;
uint8_t rcvd_byte, trans_value;
char led_status[10] = { 0 };
uint32_t adc_value;
float conv_value;
int main(void)
{
/* Initializes low level hardware at the processor level */
HAL_Init();
// Sets other clock sources besides HSI
if( SystemClock_Config(HSI_16) != Execution_Succesfull)
return Execution_Failed;
// Configure the USART2 module
if( USART_Config(&usart2, USART2) != Execution_Succesfull )
return Execution_Failed;
// Configure the USART2 module
if( USART_Config(&usart3, USART3) != Execution_Succesfull )
return Execution_Failed;
// Configure the ADC module
if( ADC_Config(&adc1, ADC1, ADC_CHANNEL_1) != Execution_Succesfull )
return Execution_Failed;
// Configure the LED Pin
if ( LED_Config() != Execution_Succesfull )
return Execution_Failed;
if( HAL_UART_Receive_IT(&usart2, &rcvd_byte, 1) != HAL_OK )
for(;;);
for(;;)
{
if( HAL_ADC_Start(&adc1) != HAL_OK )
return Execution_Failed;
if( HAL_ADC_PollForConversion(&adc1, HAL_MAX_DELAY) == HAL_OK )
{
adc_value = HAL_ADC_GetValue(&adc1);
conv_value = ((float)adc_value * 255.0) / 4096.0;
trans_value = (uint8_t)conv_value;
}
if( HAL_ADC_Stop(&adc1) != HAL_OK )
return Execution_Failed;
if( HAL_UART_Transmit(&usart2, &trans_value, 1, HAL_MAX_DELAY) != HAL_OK )
for(;;);
}
return Execution_Succesfull;
}
ReturnStatus SystemClock_Config(Clock_Source_t clk)
{
RCC_OscInitTypeDef osc_init;
RCC_ClkInitTypeDef clk_init;
memset(&osc_init, 0, sizeof(osc_init));
memset(&clk_init, 0, sizeof(clk_init));
switch (clk)
{
case HSI_16:
break;
case HSI_8:
osc_init.OscillatorType = RCC_OSCILLATORTYPE_HSI;
osc_init.HSIState = RCC_HSI_ON;
if ( HAL_RCC_OscConfig(&osc_init) != HAL_OK )
return Execution_Failed;
clk_init.ClockType = RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
clk_init.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
clk_init.AHBCLKDivider = RCC_SYSCLK_DIV2;
clk_init.APB1CLKDivider = RCC_HCLK_DIV2;
clk_init.APB2CLKDivider = RCC_HCLK_DIV1;
if ( HAL_RCC_ClockConfig(&clk_init, FLASH_ACR_LATENCY_0WS) != HAL_OK )
return Execution_Failed;
break;
case HSE_4:
osc_init.OscillatorType = RCC_OSCILLATORTYPE_HSE;
osc_init.HSEState = RCC_HSE_ON; // YOU HAVE TO CHECK ON THE SCHEMATIC WHETHER HSE IS BYPASSED OR NOT!!!
if ( HAL_RCC_OscConfig(&osc_init) != HAL_OK )
return Execution_Failed;
clk_init.ClockType = RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
clk_init.SYSCLKSource = RCC_SYSCLKSOURCE_HSE;
clk_init.AHBCLKDivider = RCC_SYSCLK_DIV2;
clk_init.APB1CLKDivider = RCC_HCLK_DIV2;
clk_init.APB2CLKDivider = RCC_HCLK_DIV2;
if ( HAL_RCC_ClockConfig(&clk_init, FLASH_ACR_LATENCY_0WS) != HAL_OK )
return Execution_Failed;
__HAL_RCC_HSI_DISABLE(); //Disable HSI to reduce Power Consumption.
break;
case HSE_2:
osc_init.OscillatorType = RCC_OSCILLATORTYPE_HSE;
osc_init.HSEState = RCC_HSE_ON; // YOU HAVE TO CHECK ON THE SCHEMATIC WHETHER HSE IS BYPASSED OR NOT!!!
if ( HAL_RCC_OscConfig(&osc_init) != HAL_OK )
return Execution_Failed;
clk_init.ClockType = RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
clk_init.SYSCLKSource = RCC_SYSCLKSOURCE_HSE;
clk_init.AHBCLKDivider = RCC_SYSCLK_DIV4;
clk_init.APB1CLKDivider = RCC_HCLK_DIV2;
clk_init.APB2CLKDivider = RCC_HCLK_DIV2;
if ( HAL_RCC_ClockConfig(&clk_init, FLASH_ACR_LATENCY_0WS) != HAL_OK )
return Execution_Failed;
__HAL_RCC_HSI_DISABLE(); //Disable HSI to reduce Power Consumption.
break;
case PLL_84:
#if !NO_PLL
osc_init.OscillatorType = RCC_OSCILLATORTYPE_HSE;
osc_init.HSEState = RCC_HSE_ON;
// Enable the clock to the power ccontroller.
__HAL_RCC_PWR_CLK_ENABLE();
// Set regulator voltage scale as 1.
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
// Turn on the over drive mode.
osc_init.PLL.PLLState = RCC_PLL_ON;
osc_init.PLL.PLLSource = RCC_PLLSOURCE_HSE;
osc_init.PLL.PLLM = 16;
osc_init.PLL.PLLN = 336;
osc_init.PLL.PLLP = 2;
osc_init.PLL.PLLQ = 7;
if ( HAL_RCC_OscConfig(&osc_init) != HAL_OK )
return Execution_Failed;
clk_init.ClockType = RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
clk_init.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
clk_init.AHBCLKDivider = RCC_SYSCLK_DIV2;
clk_init.APB1CLKDivider = RCC_HCLK_DIV2;
clk_init.APB2CLKDivider = RCC_HCLK_DIV2;
if ( HAL_RCC_ClockConfig(&clk_init, FLASH_ACR_LATENCY_0WS) != HAL_OK )
return Execution_Failed;
__HAL_RCC_HSI_DISABLE(); //Disable HSI to reduce Power Consumption.
break;
#endif
case PLL_42:
#if !NO_PLL
osc_init.OscillatorType = RCC_OSCILLATORTYPE_HSE;
osc_init.HSEState = RCC_HSE_ON;
// Enable the clock to the power ccontroller.
__HAL_RCC_PWR_CLK_ENABLE();
// Set regulator voltage scale as 1.
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
// Turn on the over drive mode.
osc_init.PLL.PLLState = RCC_PLL_ON;
osc_init.PLL.PLLSource = RCC_PLLSOURCE_HSE;
osc_init.PLL.PLLM = 16;
osc_init.PLL.PLLN = 336;
osc_init.PLL.PLLP = 2;
osc_init.PLL.PLLQ = 7;
if ( HAL_RCC_OscConfig(&osc_init) != HAL_OK )
return Execution_Failed;
clk_init.ClockType = RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
clk_init.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
clk_init.AHBCLKDivider = RCC_SYSCLK_DIV4;
clk_init.APB1CLKDivider = RCC_HCLK_DIV2;
clk_init.APB2CLKDivider = RCC_HCLK_DIV2;
if ( HAL_RCC_ClockConfig(&clk_init, FLASH_ACR_LATENCY_0WS) != HAL_OK )
return Execution_Failed;
__HAL_RCC_HSI_DISABLE(); //Disable HSI to reduce Power Consumption.
break;
#endif
default:
}
return Execution_Succesfull;
}
ReturnStatus USART_Config(UART_HandleTypeDef *uart_handle, USART_TypeDef *Instance)
{
memset(uart_handle, 0, sizeof(*uart_handle));
uart_handle->Instance = Instance;
uart_handle->Init.BaudRate = 9600;
uart_handle->Init.HwFlowCtl = UART_HWCONTROL_NONE;
uart_handle->Init.Mode = UART_MODE_TX_RX;
uart_handle->Init.OverSampling = UART_OVERSAMPLING_16;
uart_handle->Init.Parity = UART_PARITY_NONE;
uart_handle->Init.StopBits = UART_STOPBITS_1;
uart_handle->Init.WordLength = UART_WORDLENGTH_8B;
if( HAL_UART_Init(uart_handle) != HAL_OK )
return Execution_Failed;
return Execution_Succesfull;
}
ReturnStatus ADC_Config(ADC_HandleTypeDef *adc_handle, ADC_TypeDef *Instance, uint32_t channel)
{
memset(adc_handle, 0, sizeof(*adc_handle));
adc_handle->Instance = Instance;
adc_handle->Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4;
adc_handle->Init.Resolution = ADC_RESOLUTION_12B;
adc_handle->Init.ScanConvMode = DISABLE;
adc_handle->Init.ContinuousConvMode = DISABLE;
adc_handle->Init.DiscontinuousConvMode = DISABLE;
adc_handle->Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
adc_handle->Init.ExternalTrigConv = ADC_SOFTWARE_START;
adc_handle->Init.DataAlign = ADC_DATAALIGN_RIGHT;
adc_handle->Init.NbrOfConversion = 1;
adc_handle->Init.DMAContinuousRequests = DISABLE;
adc_handle->Init.EOCSelection = ADC_EOC_SINGLE_CONV;
if (HAL_ADC_Init(adc_handle) != HAL_OK)
return Execution_Failed;
ADC_ChannelConfTypeDef sConfig = { 0 };
sConfig.Channel = channel;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_28CYCLES;
if (HAL_ADC_ConfigChannel(adc_handle, &sConfig) != HAL_OK)
return Execution_Failed;
return Execution_Succesfull;
}
ReturnStatus LED_Config(void)
{
GPIO_InitTypeDef led_gpio = { 0 };
// Enable the clock for the GPIO
__HAL_RCC_GPIOA_CLK_ENABLE();
led_gpio.Pin = GPIO_PIN_4;
led_gpio.Speed = GPIO_SPEED_FREQ_LOW;
led_gpio.Pull = GPIO_NOPULL;
led_gpio.Mode = GPIO_MODE_OUTPUT_PP;
HAL_GPIO_Init(GPIOA, &led_gpio);
return Execution_Succesfull;
}
void Delay(uint32_t ms)
{
DWT->CTRL |= (1 << 0); // Enable the DTW counter of the CortexM4
uint32_t start = DWT->CYCCNT;
uint32_t ticks = ms * (HAL_RCC_GetHCLKFreq() / 1000);
while ((DWT->CYCCNT - start) < ticks);
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART2)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, rcvd_byte);
if(rcvd_byte == 0)
sprintf(led_status, "LED OFF\r\n");
else if(rcvd_byte == 1)
sprintf(led_status, "LED ON\r\n");
if( HAL_UART_Transmit(&usart3, (uint8_t *)led_status, sizeof(led_status), HAL_MAX_DELAY) != HAL_OK )
for(;;);
memset(led_status, 0, sizeof(led_status));
if( HAL_UART_Receive_IT(&usart2, &rcvd_byte, 1) != HAL_OK )
for(;;);
}
}
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART2)
{
}
}
/*
* my_main.h
*
* Created on: Mar 14, 2026
* Author: georgegio
*/
#ifndef INC_MY_MAIN_H_
#define INC_MY_MAIN_H_
#include <string.h>
#include <stdint.h>
#include <stdio.h>
#include <math.h>
#include "stm32f4xx_hal.h"
/*
* @brief This is a custom enumeration for the return status
*/
// If no PLL clock available set this to 1.
#define NO_PLL ( 1 )
typedef enum
{
Execution_Succesfull = 0,
Execution_Failed = 1
} ReturnStatus;
/*
* @brief This is the enumeration type for the supported clocks.
*/
typedef enum
{
HSI_16 = 0,
HSI_8 = 1,
HSE_4 = 2,
HSE_2 = 3,
PLL_84 = 4,
PLL_42 = 5,
} Clock_Source_t;
/*
* @brief This function sets the appropriate clock source for our circuit.
*/
ReturnStatus SystemClock_Config(Clock_Source_t clk);
/*
* @brief This function configures the USART1 module.
*/
ReturnStatus USART_Config(UART_HandleTypeDef *uart_handle, USART_TypeDef *Instance);
/*
* brief This function configures the ADC module.
*/
ReturnStatus ADC_Config(ADC_HandleTypeDef *adc_handle, ADC_TypeDef *Instance, uint32_t channel);
/*
* @brief This function configures the GPIO LED Pin.
*/
ReturnStatus LED_Config(void);
/*
* @brief This function implements delay in ms with the DWT module(Debugging and profiling feature in Arm Cortex-M processors, measures CPU cycles).
*/
void Delay(uint32_t ms);
#endif /* INC_MY_MAIN_H_ */
/*
* msp.c
*
* Created on: Mar 14, 2026
* Author: georgegio
*/
#include "my_main.h"
void HAL_MspInit(void)
{
HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_4);
// Enable necessary IRQs
HAL_NVIC_SetPriority(MemoryManagement_IRQn, 0, 0);
HAL_NVIC_SetPriority(BusFault_IRQn, 0, 0);
HAL_NVIC_SetPriority(UsageFault_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(MemoryManagement_IRQn);
HAL_NVIC_EnableIRQ(BusFault_IRQn);
HAL_NVIC_EnableIRQ(UsageFault_IRQn);
}
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
GPIO_InitTypeDef gpio_uart2, gpio_uart3;
if(huart->Instance == USART2)
{
memset(&gpio_uart2, 0, sizeof(gpio_uart2));
// Enable the UART and GPIO PORTA clock.
__HAL_RCC_USART2_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
gpio_uart2.Pin = GPIO_PIN_2 | GPIO_PIN_3;
gpio_uart2.Speed = GPIO_SPEED_FREQ_LOW;
gpio_uart2.Mode = GPIO_MODE_AF_PP;
gpio_uart2.Alternate = GPIO_AF7_USART2;
gpio_uart2.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOA, &gpio_uart2);
HAL_NVIC_SetPriority(USART2_IRQn, 8, 0);
HAL_NVIC_EnableIRQ(USART2_IRQn);
}
if(huart->Instance == USART3)
{
memset(&gpio_uart3, 0, sizeof(gpio_uart3));
// Enable the UART and GPIO PORTA clock.
__HAL_RCC_USART3_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
gpio_uart3.Pin = GPIO_PIN_10 | GPIO_PIN_11;
gpio_uart3.Speed = GPIO_SPEED_FREQ_LOW;
gpio_uart3.Mode = GPIO_MODE_AF_PP;
gpio_uart3.Alternate = GPIO_AF7_USART3;
gpio_uart3.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOB, &gpio_uart3);
HAL_NVIC_SetPriority(USART3_IRQn, 8, 0);
HAL_NVIC_EnableIRQ(USART3_IRQn);
}
}
void HAL_ADC_MspInit(ADC_HandleTypeDef *hadc)
{
if(hadc->Instance == ADC1)
{
GPIO_InitTypeDef gpio_adc = { 0 };
// Enable the clocks for the ADC module and the relative GPIO port.
__HAL_RCC_ADC1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
gpio_adc.Pin = GPIO_PIN_1;
gpio_adc.Mode = GPIO_MODE_ANALOG;
gpio_adc.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &gpio_adc);
}
}/*
* it.c
*
* Created on: Mar 14, 2026
* Author: georgegio
*/
#include "my_main.h"
extern UART_HandleTypeDef usart2, usart3;
void SysTick_Handler(void)
{
HAL_IncTick();
HAL_SYSTICK_IRQHandler();
}
void USART2_IRQHandler(void)
{
HAL_UART_IRQHandler(&usart2);
}
void USART3_IRQHandler(void)
{
HAL_UART_IRQHandler(&usart3);
}
void HardFault_Handler(void)
{
// Halt execution, when HardFault error occurs.
for(;;);
}
void MemManage_Handler(void)
{
// Halt execution, when MemManage error occurs.
for(;;);
}
void BusFault_Handler(void)
{
// Halt execution, when BusFault error occurs.
for(;;);
}
void UsageFault_Handler(void)
{
// Halt execution, when UsageFault error occurs.
for(;;);
}Output
Video
Add a video of the output (know more)
Photo of Output
Add a photo of your hardware showing the output.
Screenshot of Serial Terminal
Add a Screenshot of the serial terminal showing the output.
Was this helpful?
Upvote
Downvote